
















Introducción.
El presente artículo tiene por objeto describir y argumentar a modo de ingeniería conceptual una propuesta instrumental y plataforma de procesamiento para un “Sistema de Alineamiento por GPS para Sistemas de Correa Transportadoras”.
- Descripción general del requerimiento para el Sistemas de Correa Transportadoras.
Con el objeto de formar pilas de material en forma distribuida, el cliente posee un Sistemas de Correa Transportadoras, tal como se puede ver en la siguiente imagen y correspondiente diagrama de sección transversal.

Imagen General del Sistemas de Correa Transportadoras
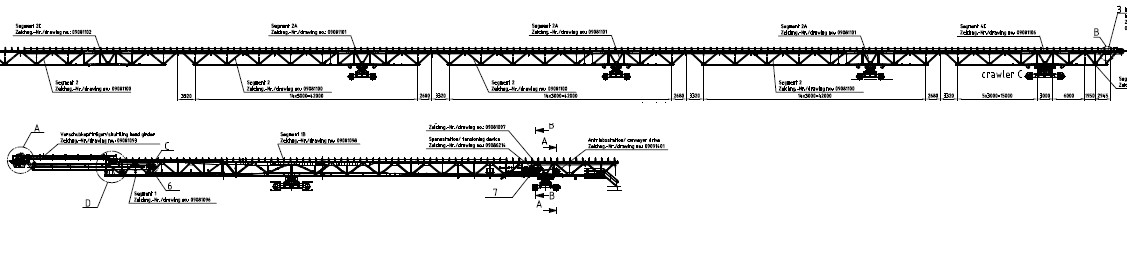
Sección Transversal de Correa Transportadora
Como puede observarse del diagrama de sección transversal del Sistemas de Correa Transportadoras, este posee un medio de tracción mediante una serie de sistemas de orugas, los cuales trasladan el sistema longitudinalmente en dirección transversal, tal como se muestra a continuación

Descripción Vectorial del Movimiento Espacial de la correa transportadora
A partir de esta descripción generalizada del sistema en cuanto a su traslado por sobre las canchas de material se plantea la necesidad de medir la estabilidad y alineamiento de los sistemas de tracción de material de manera de no producir torque y eventuales fenómenos de torsión a lo largo de la estructura del puente apilador. En la siguiente figura se indica un diagrama conceptual de la necesidad de medición para alineación longitudinal de las orugas que trasladan el punto apilador.

Descripción Vectorial del Requerimiento de Medición en los Sistemas de Tracción para Correa Transportadora
- Proposición conceptual para instrumentación de monitoreo.
De acuerdo al requerimiento de medición descrito en el apartido anterior, a continuación se argumentará el modelo conceptual para la instrumentación que se presentará como de modelo de solución para un sistema de medición por sensores GNSS de la desalineación transversal de los sistemas de tracción por orugas.
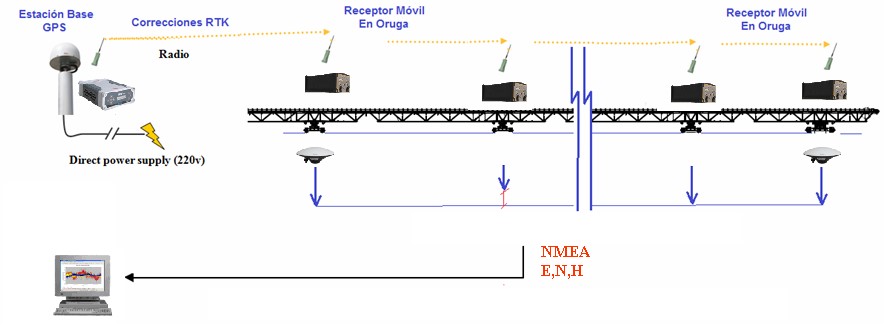
De acuerdo a lo anterior, a continuación se despliega gráficamente la solución conceptual que se puede implementar para el proyecto de monitoreo.
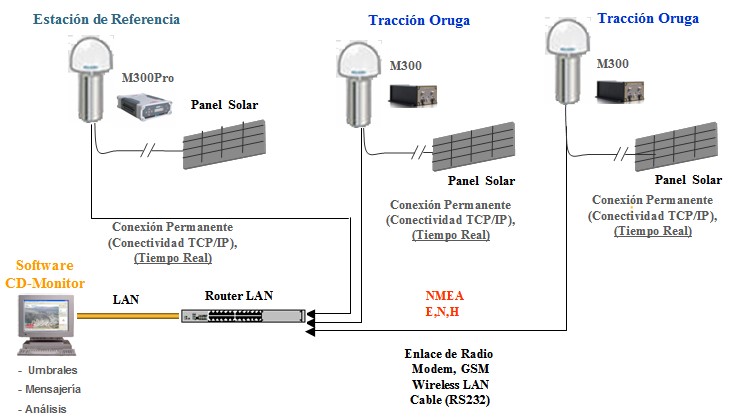
Modelo Conceptual para Solución GPS en Sistema Tracciòn de Correa Transportadora
Esta propuesta se basa en una red de receptores GNSS diseñados para control de maquinaria situados en aquellos puntos en que el puente es desplazado transversalmente por el sistema de oruga. Además, se dispone de un receptor base situado en una posición conocida cuyo propósito es enviar datos de corrección para los receptores móviles que estarán posicionados sobre las orugas. Con esto, las orugas serán posicionadas espacialmente con una precisión centimétrica.
La información de posicionamiento de cada sistema oruga puede ser enviada a un software procesamiento espacial, el cual determinará el alineamiento de los sistemas orugas intermedias respecto de algún punto intermedio o de interés por parte del usuario.
A continuación se muestra un esquema general de solución aplicado al modelo de solución planteado
Con este modelo conceptual el sistema establece las coordenadas de los puntos de tracción por oruga mediante procesos de cálculos vectoriales GPS en tiempo real. Luego, dichas coordenadas calculadas son utilizadas por una herramienta de procesamiento espacial para el análisis de desplazamiento transversal de las orugas, permitiendo configurar umbrales de monitoreo para el desplazamiento transversal el cual será representativo de la no alineación del sistema de tracción. En el caso de que los umbrales sean superados en términos de la tolerancia fijada por el usuario, el sistema de vigilancia puede alertar por mensajería electrónica, celular o accionamiento electromecánico activado por Web Relé.
Adicionalmente, el modelo de solución planteado puede ser modificado y adaptado para que la unidad CPU del Sistema de Control (PLC), pueda recibir las posiciones de las distintas orugas de tracción de manera que el mismo sistema pueda reaccionar para efectos de alineamiento y eventual posicionamiento de las orugas, tal como se muestra a continuación.
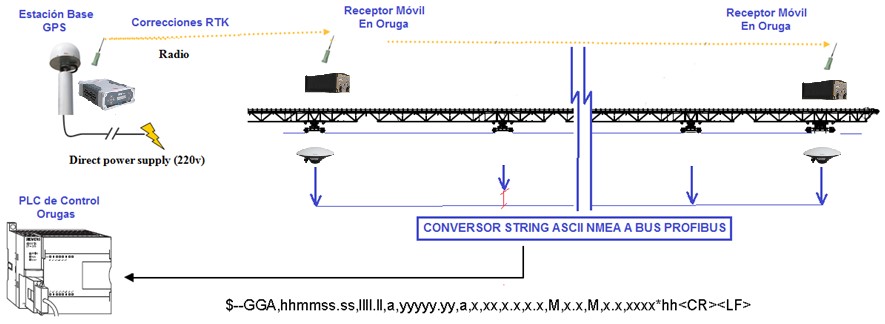
De acuerdo a lo anterior, se establece que cada Sistema Oruga (Sensor GPS) estaría enviando información de posicionamiento a una Estación de Trabajo (PC o PLC), la cual tendría una herramienta de procesamiento espacial. Esta unidad debe capturar la información espacial de cada oruga para su análisis desde el punto de vista de desplazamiento, eventuales alertas y acciones de control para el sistema de accionamiento. De esta manera, el usuario podría disponer de las siguientes utilidades sobre el sistema de tracción:
- Configuración de muestro para el posicionamiento.
- Análisis geométrico.
- Análisis de alineamiento entre orugas.
- Configuración de alertas para alarmas.
- Control de sistemas de accionamiento para el sistema de tracción.
- Monitoreo remoto de la posición espacial del sistema.
- Base de datos para registro histórico.
A partir de los distintos modelos de ingeniería planteados se puede apreciar que la navegación de alta precisión mediante sensores GNSS cumple plenamente con las exigencias de los sistemas de control para el accionamiento por orugas.
Sin embargo, el uso de una CPU para la determinación del posicionamiento, puede establecer diversos servicios adicionales para efectos de alerta, seguimiento, análisis de desempeño y mantenimiento.
Wernher Ibañez León
Director en Geo-tecnologías
GEOGlobalty